

موتورهای القایی در اصل ماشینهای آسنکرون هستند؛ یعنی سرعت آنها با فرکانس خط برق تغذیهشان هماهنگ است. مؤثرترین راه کنترل سرعت موتور القایی، تغییر فرکانس خط تغذیه است.
امروزه درایو فرکانس متغیر (VFD) به یک ابزار الکترونیکی فراگیر برای کنترل فرکانس خط AC تبدیل شده است. درایو با تولید یک موج تقریبی از سینوسی به صورت کلیدزنی (سوئیچینگ)، امکان تغییر گسترده فرکانس را فراهم میکند. همین ویژگی باعث شده که VFDها عمدتاً برای کنترل سرعت موتورهای القایی مورد استفاده قرار گیرند.
پیشرفت فناوری ترانزیستورهای قدرت، این امکان را فراهم کرده که VFDها بارهای بسیار بزرگتری را با هزینه کمتر کنترل کنند. نتیجه این پیشرفت، درایوهایی کوچکتر، ارزانتر و راحتتر برای نصب است که یک محدوده سرعت تقریباً بینهایت متغیر را پوشش میدهند و جایگزین مناسبی برای سامانههای مکانیکی پرهزینه و پیچیده محسوب میشوند.
VFD در مقابل درایو مکانیکی
توان خروجی هر سیستم برابر است با سرعت × گشتاور.
- درایو مکانیکی (با وجود تلفات اصطکاکی) معمولاً یک درایو با توان ثابت است؛ یعنی اگر سرعت کاهش یابد، گشتاور خروجی برای یک توان ورودی مشخص افزایش مییابد.
- اما VFD ذاتاً یک درایو با گشتاور ثابت است. بنابراین با کاهش سرعت موتور، توان خروجی نیز کاهش مییابد.
این تفاوت کلیدی باعث میشود که در کاربردهایی که نیاز به توان ثابت در سرعتهای پایین دارند، یا باید از کاهندههای مکانیکی کمک گرفت یا موتور را بزرگتر از نیاز واقعی انتخاب کرد.
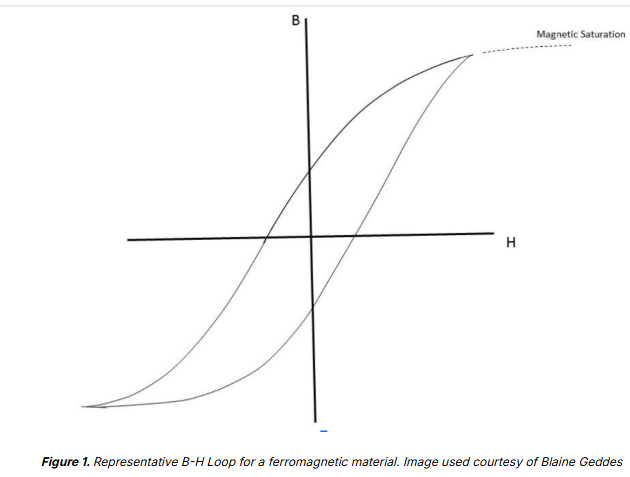
علت این رفتار در فیزیک موتور الکتریکی نهفته است. با کاهش سرعت، نیروی ضد محرکه
( (Back EMF موتور کم میشود، جریان خط افزایش پیدا میکند و این موضوع تلفات هسته را بیشتر میکند. برای جلوگیری از اشباع مغناطیسی، VFD همواره نسبت ولت بر هرتز (V/Hz) را ثابت نگه میدارد و در نتیجه به صورت گشتاور ثابت کار میکند.
شکل موج خروجی VFD
جریان AC تولید شده توسط درایو، یک موج سینوسی واقعی مانند خروجی ژنراتور نیست، بلکه مجموعهای از پالسهای کلیدزنی است. این امواج دارای هارمونیکهای زیاد هستند که بخشی از آن توسط بارهای سلفی فیلتر میشود.
برای بیشتر موتورهای القایی، این اعوجاج مشکلی ایجاد نمیکند و بسیاری از موتورها بدون مشکل با VFD کار میکنند. شکل موجهای پالسی با روش مدولاسیون پهنای پالس (PWM) ساخته میشوند؛ یعنی عرض پالسها طوری تغییر میکند که انرژی مؤثر ولتاژ RMS برابر با یک موج سینوسی واقعی باشد.
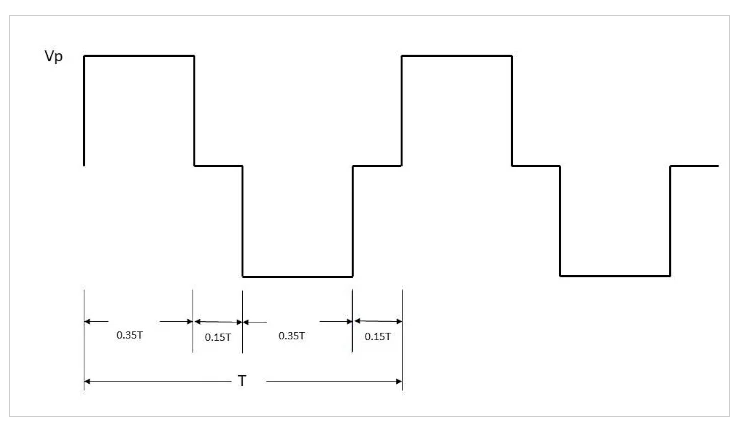
هرچه تعداد پالسها بیشتر باشد، شکل موج خروجی به سینوس نزدیکتر میشود، اما این به قیمت افزایش تلفات سوئیچینگ ترانزیستورها تمام میشود.
اجزای اصلی یک VFD
یک درایو فرکانس متغیر از چند بخش اصلی تشکیل شده است:
- مبدل ورودی: برق AC را به DC تبدیل میکند.
- بخش فیلتر: برای صاف کردن ولتاژ DC.
- بخش سوئیچینگ (اینورتر): شامل ترانزیستورهای قدرت IGBT یا MOSFET برای تولید موج PWM.
- مولد شکل موج و کنترل: معمولاً توسط میکروکنترلر پیادهسازی میشود.
رابط کاربری: شامل کیپد، پورت دیجیتال برای اتصال به PLC یا رایانه، و گاهی پتانسیومتر برای تنظیم سریع فرکانس
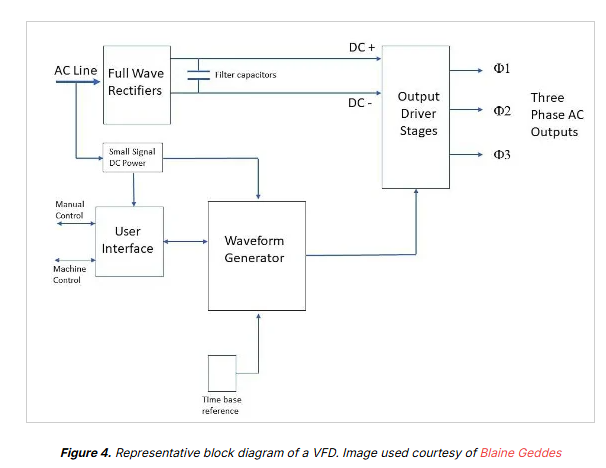
در خروجی، معمولاً سه موج سهفاز با اختلاف فاز 120 درجه تولید میشود. ورودی میتواند تکفاز یا سهفاز باشد، که همین موضوع باعث شده VFDها راهکاری مناسب برای راهاندازی بارهای سهفاز با ورودی تکفاز باشند.
جمعبندی
درایوهای فرکانس متغیر امروز به ابزاری حیاتی در صنعت تبدیل شدهاند. شناخت اصول کارکرد، ساختار داخلی و محدودیتهای آنها برای هرکسی که در حوزه برق و اتوماسیون فعالیت میکند، ضروری است.